Definition of Posterior Belief:
$$Bel(x_t) \equiv P(x_t | z_{1:t}, u_{1:t})$$1st Assumption: Markovian Property
$$P(x_t | x_{t-1}, z_{1:t-1}, u_{1:t}) = P(x_t | x_{t-1}, u_t)$$2nd Assumption: Sensor Independent
$$P(z_t | x_t, z_{1:t-1}, u_{1:t}) = P(z_t | x_t)$$Graphical Model Illustration
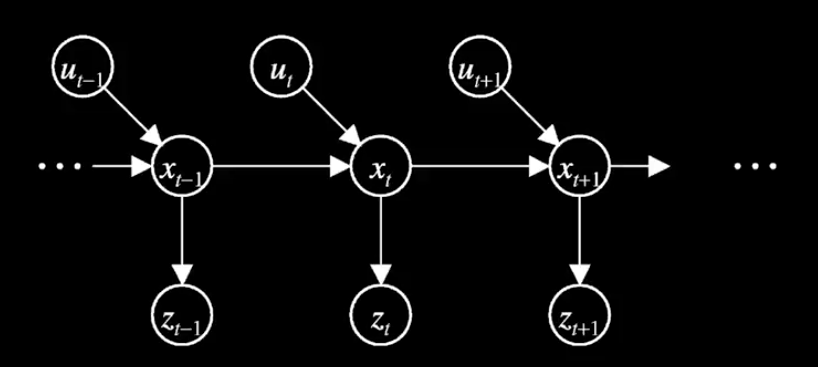
Recursive relationship between $Bel(x_t)$ and $Bel(x_{t-1})$
\begin{equation} \begin{split} Bel(x_t) & = P(x_t | z_{1:t}, u_{1:t}) \\ & = \eta P(z_t | x_t, z_{1:t-1}, u_{1:t})P(x_t | z_{1:t-1}, u_{1:t}) \\ & = \eta P(z_t | x_t)P(x_t | z_{1:t-1}, u_{1:t}) \\ & = \eta P(z_t | x_t)\int P(x_t | x_{t-1}, z_{1:t-1}, u_{1:t})P(x_{t-1} | z_{1:t-1}, u_{1:t})dx_{t-1} \\ & = \eta P(z_t | x_t)\int P(x_t | x_{t-1}, u_t)P(x_{t-1} | z_{1:t-1}, u_{1:t-1})dx_{t-1} \\ & = \eta P(z_t | x_t)\int P(x_t | x_{t-1}, u_t)Bel(x_{t-1})dx_{t-1} \end{split} \end{equation}Formulation of Kalman Filter¶
$$\text{Objective: } Bel(x_t) = N(\mu_t, \Sigma_t)$$
0th Assumption:
$$Bel(x_0) = N(\mu_0, \Sigma_0)$$Strong 1st Assumption:
$$x_t = A_t x_{t-1} + B_t u_t + \epsilon_t$$Strong 2th Assumption:
$$z_t = C_t x_t + \delta_t$$These assumptions ensure that $Bel(x_t) = N(\mu_t, \Sigma_t)$. The relationship between $\mu_t, \Sigma_t$ and $\mu_{t-1}, \Sigma_{t-1}$ is determined by the following algorithm:
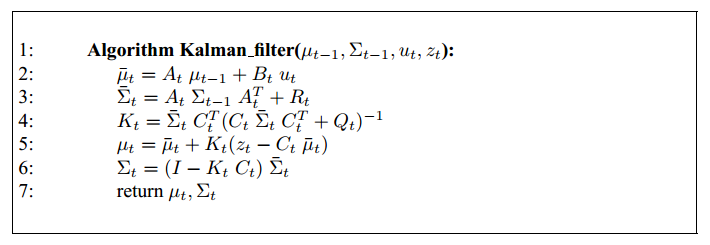
Explanation
$$\text{Prediction} => \int P(x_t | x_{t-1}, u_t)Bel(x_{t-1})dx_{t-1} => \text{line 2, line 3}$$$$\text{Correction} => P(z_t | x_t) => \text{line 5, line 6}$$Formulation of Particle Filter¶
Particle Filter
$$\text{Objective: } P(x_t \in X_t) \approx Bel(x_t)$$0th Assumption:
$$P(x_0 \in X_0) \approx Bel(x_0)$$This assumption, combined with the initial two assumptions of Bayes filter, ensures that the following algorithm will generate the $X_t$ that satisfies $P(x_t \in X_t) \approx Bel(x_t)$:
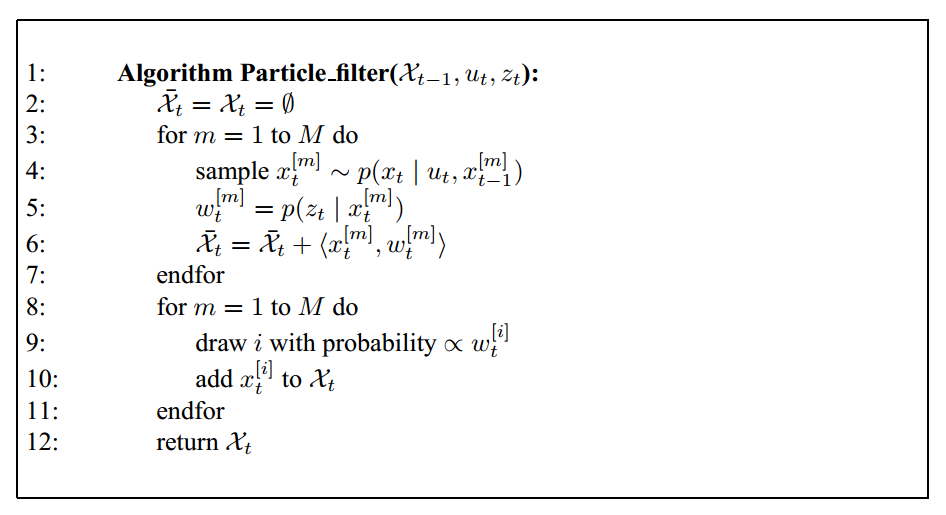
Explanation
$$\text{Prediction} => \int P(x_t | x_{t-1}, u_t)Bel(x_{t-1})dx_{t-1} => \text{line 3, line 4}$$$$\text{Correction} => P(z_t | x_t) => \text{line 9}$$A Tracking Demo using Particle Filter¶
#%matplotlib inline
import numpy as np
import matplotlib.pyplot as plt
import cv2
from matplotlib import animation, rc
from IPython.display import HTML
fig = plt.figure()
image = None
video = cv2.VideoCapture('images/pres_debate.avi')
window = open("images/pres_debate.txt")
pos = [int(float(num.strip())) for num in window.readline().split(' ')]
size = [int(float(num.strip())) for num in window.readline().split(' ')]
template = None
particle_num = 200
particle_set = np.ndarray((particle_num,2), dtype=np.int)
particle_wgt = np.ones((particle_num))
def updatefig(i, *args):
global image, template, size, pos, window, particle_set, particle_wgt, particle_num
global l_margin, r_margin, t_margin, b_margin
ret, frame = video.read()
if ret:
# Predict next positions
if template is not None:
x = particle_set[:,0] + np.transpose(np.random.normal(0.0, 4.0, (particle_num)).astype(np.int))
y = particle_set[:,1] + np.transpose(np.random.normal(0.0, 4.0, (particle_num)).astype(np.int))
particle_set[:,0] = np.clip(x, l_margin, r_margin)
particle_set[:,1] = np.clip(y, t_margin, b_margin)
else:
l_margin = int(size[0]/2)+1
r_margin = frame.shape[1] - int(size[0]/2)-1
t_margin = int(size[1]/2)+1
b_margin = frame.shape[0] - int(size[1]/2)-1
particle_set[:,0] = np.random.randint(l_margin, r_margin, particle_num)
particle_set[:,1] = np.random.randint(t_margin, b_margin, particle_num)
template = np.copy(frame[pos[1]:pos[1]+size[1], pos[0]:pos[0]+size[0]])
template = np.float32(cv2.cvtColor(template, cv2.COLOR_BGR2GRAY))
# Update particle weights
for i in range(particle_num):
x = particle_set[i,0]
y = particle_set[i,1]
can_match = np.copy(frame[y-t_margin:y+t_margin-1, x-l_margin:x+l_margin-1])
can_match = np.float32(cv2.cvtColor(can_match, cv2.COLOR_BGR2GRAY))
weight = np.exp(-np.sum(np.square(can_match-template))/template.shape[0]/template.shape[1]/2/100)
particle_wgt[i] = weight
particle_wgt = particle_wgt/np.sum(particle_wgt)
# Resample the particles
indices = np.random.choice(particle_num, particle_num, p = list(particle_wgt))
particle_set = particle_set[indices]
# Debugging
for i in range(particle_num):
cv2.circle(frame, tuple(particle_set[i]), 2, (255,0,0), 2)
if image is not None:
image.set_array(frame)
else:
image = plt.imshow(frame, cmap=plt.get_cmap('hsv'))
return image,
anim = animation.FuncAnimation(fig, updatefig, interval=50, blit=True)
HTML(anim.to_html5_video())
comments powered by Disqus